Final Presentation
- The clay was fired in an ceramic oven with 900°C and then presented and exhibited at the TU Sommerfest, Studiorooms at „Alte Technik“ Rechbauerstraße


Unit 07-14: Final Design, Procedure and Execution
- As students were familiar with procedure algorithms and execution they started designing their final tool and procedure for their dish with a wet clay mixture containing 25% water.
Unit 05-06: Assignment Execution and Revision
- Half of the procedures were executed in Unit 05, the other half worked on their procedures again were executed in Unit 06:













Unit 04: Assignment Presentation
- Think of a design which can be executed with the robot
- Consider using one of the two available 3D-printed tools or use your own custom tool!
- Create a coherent procedure for your task (dip in, dip out, stamp, roll etc.) which could be an approximation of your final design
- Solve „out of reach“ targets and collisions
- Do a managable task. It is more important that your procedure works and you get familiar with the robot.
- Present your idea in the unit through sketches or with models
- After the feedback you can work on it until wednesday, deadline: 03. May 23:59
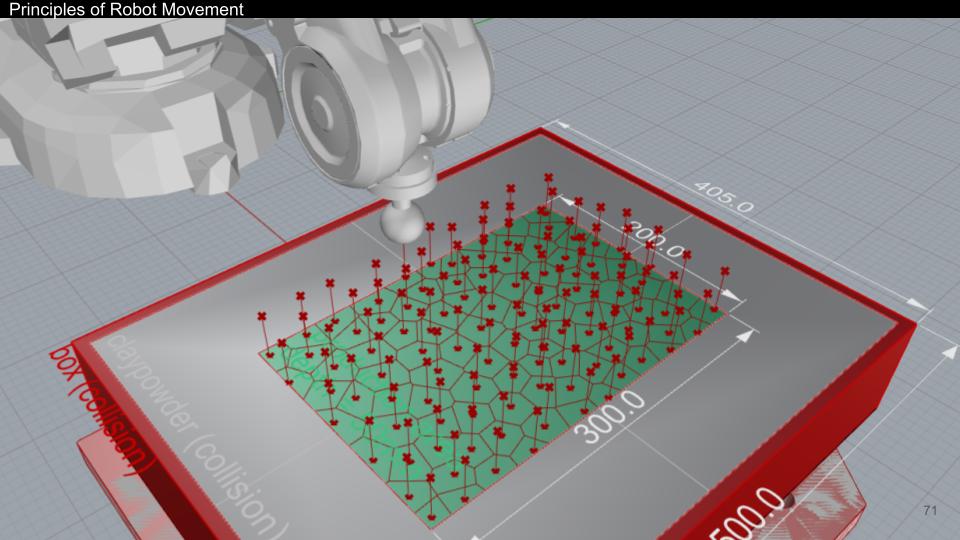
Unit 03: Exercise 03
Creation of Voronoi Pattern:
- Elaborate Setup with Collision and Claypowder Box
- Definition of Production Area
- List orders, movements and motions -> Dipping in and out of the clay powder
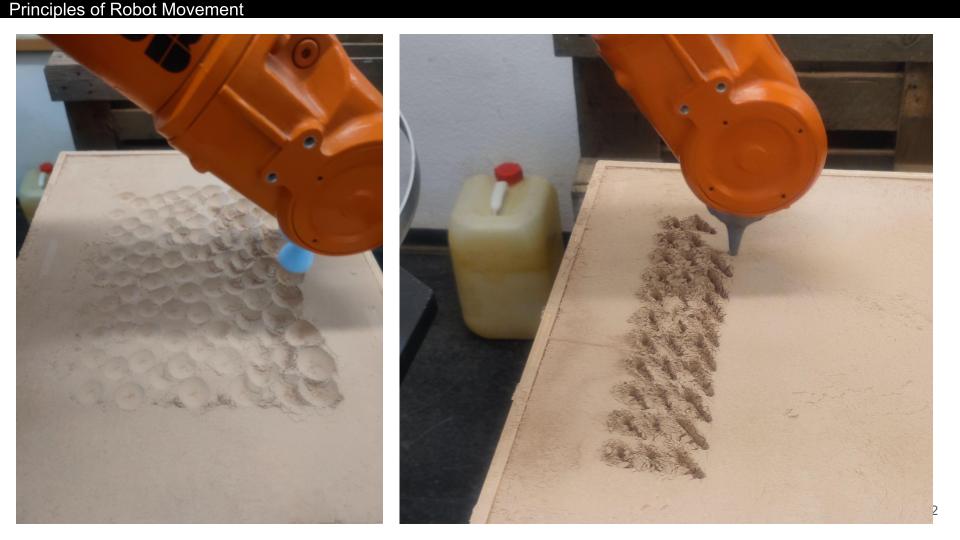
Testing the creation
- Getting familiar with the robot
- Try codes
- Execute Voronoi Program we created
Assignment:
- Create assignment
- Present and discuss in next unit and Upload to Google Drive until 02. May 23:59 -> Production at 09. May
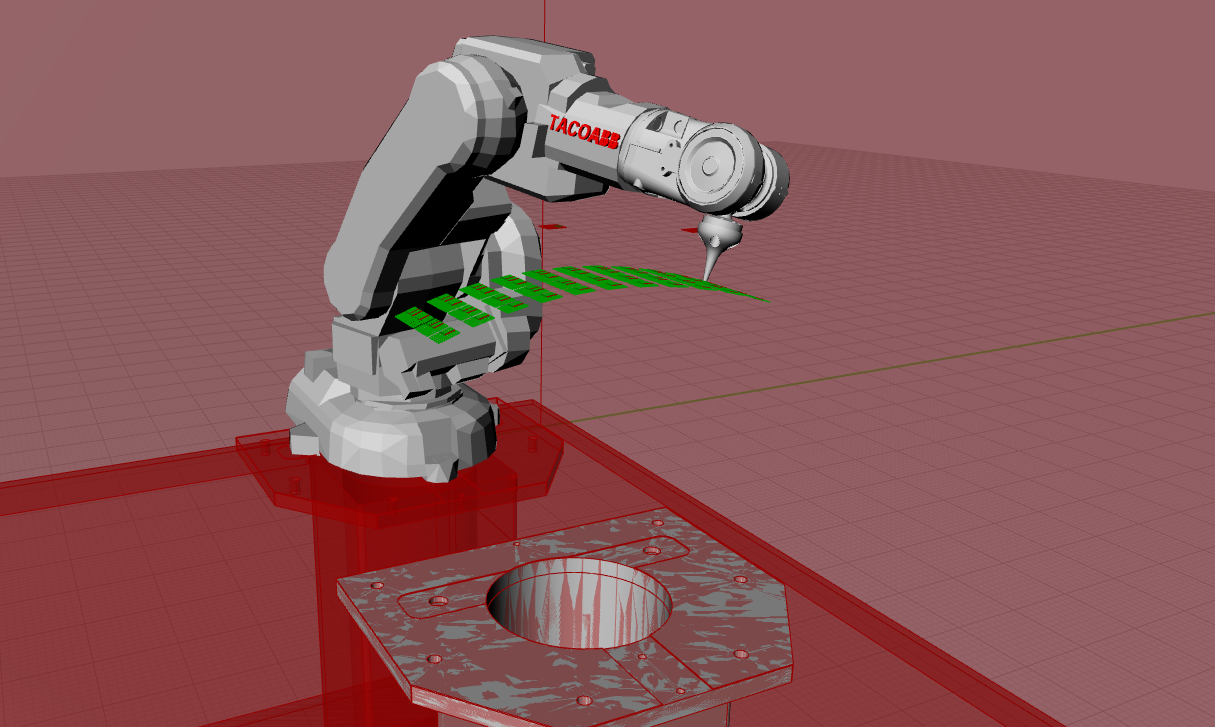
Unit 02: Exercise 02
- Recap of the Taco Setup (Inverse Kinematic Solver, Robot, Tool, TCP Calculator)
- Load in Environment and Collision Detection for Objects (Breps)
- Custom Tool with straight Tip
- Custom Tool with angled Tip
- Convert Curves in Points, different ways + most beneficial one
- 2D Curve, 3D Curve, Perpendicular follow
- Series creation (regular, irregular)
- Closed Curves and simple forms (Rectangle, Polygon etc.)
- Easiest way to create tilted TCPs + Merging
- Visualization of Robot Movement between points (MoveL = Movelinear) through the „interpolate“ Component
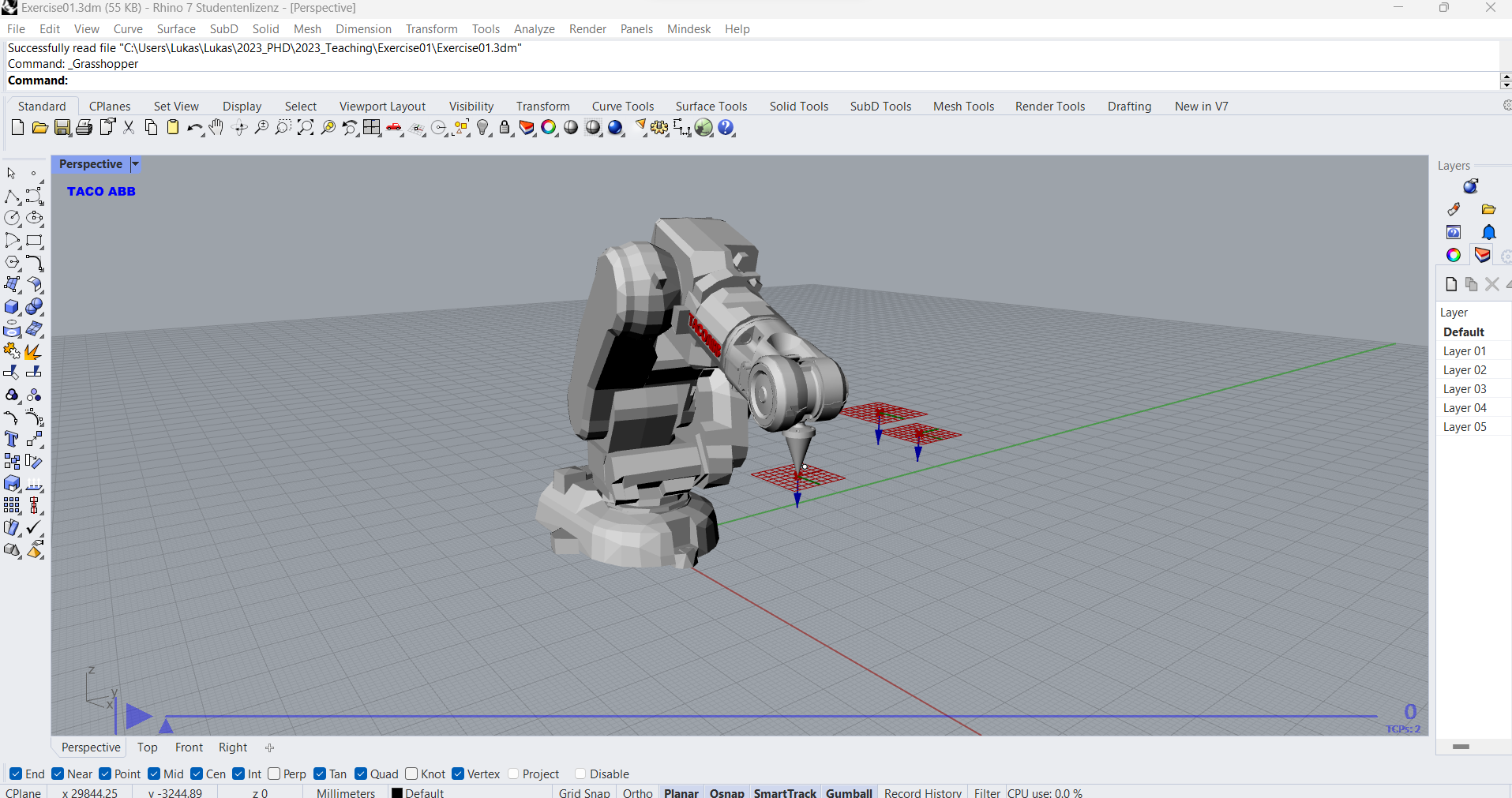
Unit 01: Exercise 01
- Basics: 6 Axis Robotic Arm (Advantages, Disadvantages, Types, Movement, Inverse Kinematic Calculation, Simulation)
- Software (What exists and what do we use?)
- Exercise: Setup + Targets (Group Exercise and Simulation of TCPs)
- GCode (Basic Understanding of what we „feed“ our Robot with)
- Summary and Outlook
Assignment: Get familiar with the Setup we created, play around with it and install Taco on your Harddrive if you want to use your own laptop. The files are also provided, you can find them on our Miro board.